Program in Scilab:
s=%s;
g=1/(s*(s+1)*(s+2));
gc=(s+0.05)/(s+0.005);
gt=gc*g;
gs=syslin('c',g);
gcs=syslin('c',gt);
clf;
subplot(3,1,1);
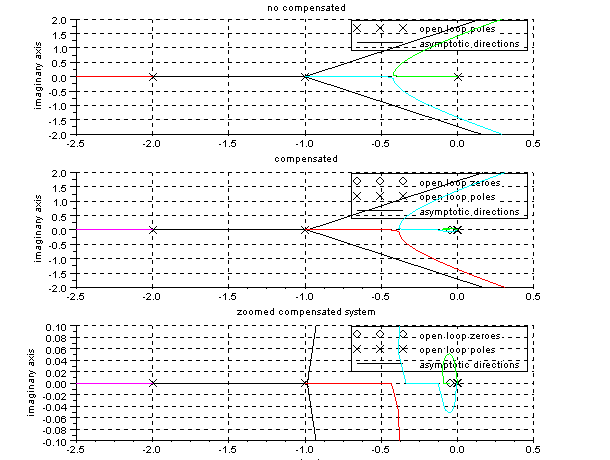
evans(gs);
mtlb_axis([-2.1 0.5 -2 2])
xgrid;
xtitle('no compensated','','imaginary axis');
subplot(3,1,2);
evans(gcs);
mtlb_axis([-2.1 0.5 -2 2])
xgrid;
xtitle('compensated','','imaginary axis');
subplot(3,1,3);
evans(gcs);
mtlb_axis([-2.1 0.5 -0.1 0.1])
xgrid;
xtitle('zoomed compensated system','real axis'
,'imaginary axis');
|
|